RQT¶
RQT is a Qt-based framework for GUI development in ROS.
All GUI applications from ROS are written using RQT, for example, rviz and ros_bag.
The GUI applications are written as RQT plugins, which can be included in windows, so one
window can include multiple RQT plugins. For example, if you run
rqt # a ros process has to be running
You can select multiple plugins from the Plugins menu in the top left. Once you have
selected a few plugins, you can save the current ‘perspective’. A perspective is a combination
of RQT plugins in a defined configuration. In the Perspectives menu you can save, import,
export and set perspectives as default. This is useful if you want, for example, to have the
input device and the gait selection tool next to each other in one window.
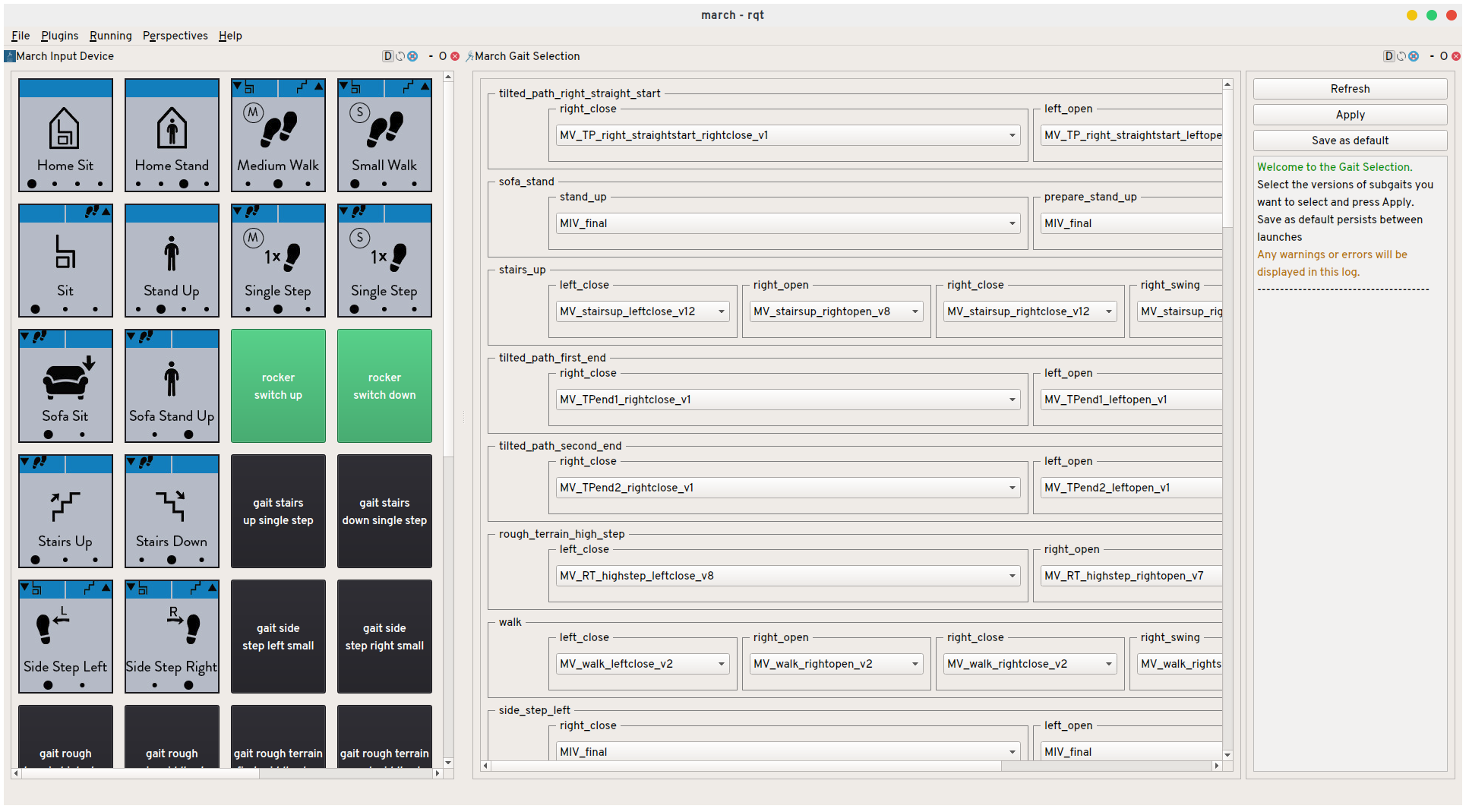
Example rqt perspective¶
The project-march/monitor repository contains RQT plugins used to monitor and control the MARCH exoskeleton and the is also an RQT plugin.