ROS bag¶
Note
The official documentation for rosbag and rqt_bag are quite comprehensive. Please refer to them if you have any questions.
rosbag is an excellent tool which allows you to record any topics you want during runtime. The recorded topics are saved to a bagfile. These bags can be easily inspected with a rqt_plugin called rqt_bag to plot the data.
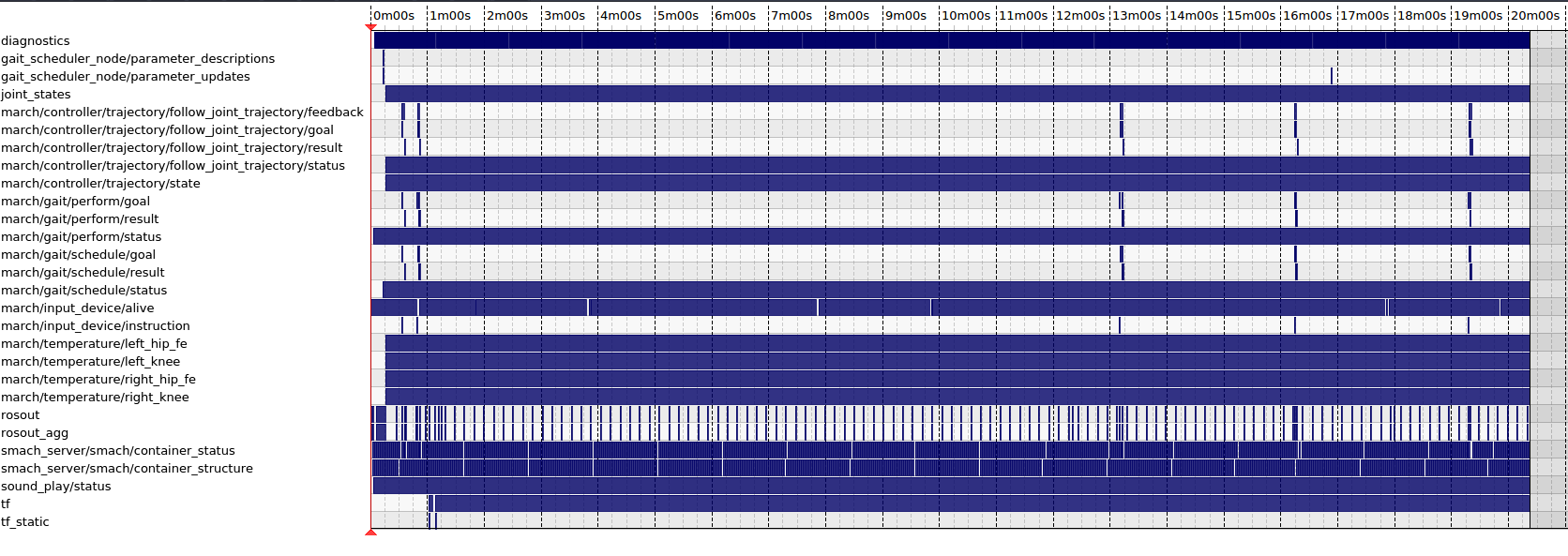
Example of rqt_bag¶
Recording bags¶
There are many ways to record a rosbag: Using the RQT plugin, with the commandline, or adding it to the launchfile.
Adding it to the launchfile is the least effort, and is done by starting the following node:
<node
pkg="rosbag"
name="record"
type="record"
output="screen"
args="-o <output_directory> /topic1 /topic2"
/>
Use the option -a to record all topics.
Hint
If you don’t specify an output directory, the log files are located in the ros home folder (~/.ros)